

نحوه آشكارسازي خطا هاي انتقال اطلاعات در سيستم هاي مولتي پلكس
1 _ امكان برگشت اطلاعات و چك مجدد.
2 _ استفاده از متد چك سام Check sum .
3 _ استفاده از متد بيت هاي پريتي Parity .
4 _ استفاده از متد كنترل CRC ( Cycle Redundancy Code ). در اين روش با در نظر گرفتن طول پيام ، فريم اطلاعاتي كوچكي به طول 15 بيت ساخته و ارسال مي كردد كه در آن بروز خطا در انتقال اطلاعات قابل آشكار سازي و تصحيح است.
5 _ عمليات تصحيح خطاها.
نكته:
در 206 مولتي پلكس براي آشكار سازي خطا در ارسال اطلاعات از روش كنترل CRC استفاده مي شود.
اهداف استفاده از سيستم مولتي پلك در 206
به طور كلي مهم ترين اهداف سيستم مولتي پلكس 206 را مي توان به شرح زير بيان داشت :
1 _ تقليل ميزان دسته سيم ها در جهت تسهيم اطلاعات مشترك سيستم هاي الكترونيك خودرو.
مثال: اطلاعات نور خودرو ( BSI , COM 2000 …, ).
اطلاعات موتور خودرو ( سرعت ، دما ، ... ) براي ECU هاي آمپر ، گيربكس و ... .
2 _ توسعه سيستم هاي مختلف در خودرو با استفاده از يك متدولوژي مشترك.
مثال: CD changer و سيستم ناوبري و ... .
سنسور باران و سنسور روشنايي .
3 _ افزايش كارايي و عملكرد سيستم با توجه به دسترسي سريع به اطلاعات.
مثال: ايجاد سازگاري صداي راديو با سرعت خودرو.
ايجاد حالت اتوماتيك در برف پاك كن هاي عقب در هنگام وقوع همزمان دنده عقب و باران.
4 _ افزايش كارايي هاي عيب يابي و ايمني.
مثال: ايجاد خود عيب يابي و ذخيره اطلاعات در ECU هاي باهوش.
برقراري حالت ايمني در زمان وقوع يك عيب خاص در ECU ها ( مانند روشن شدن برف پاك كن و چراغ هاي جلو در هنگام خرابي BSI ) .
معايب سيستم مولتي پلكس در روي خودروي 206
1 _ پيچيده شدن قابل ملاحظه فني و تكنيكي سيستم هاي الكترونيك خودرو به گونه اي كه طبق روال گذشته نمي توان با سعي و خطا در روي خودرو به ماهيت كاري سيستم هاي مختلف پي برد.
2 _ وابسته شدن اكيد كنترل يونيت هاي موجود در خودرو به دستگاه هاي عيب ياب استاندارد پژو براي پيدا كردن عيب و رفع آن ها.
3 _ نياز به آموزش هاي طولاني مدت و كلاسيك براي فراگيري سيستم و يادگيري چگونگي انجام تعميرات.
4 _ نياز به تعويض يك قطعه گران قيمت مانند BSI يا COM 2000 به دليل وجود يك عيب كوچك.
5_ كمبود تجهيزاتي كه در هنگام به وجود آمدن مشكل حاد فني بتواند سيستم را آناليز نمايد.
6 _ عدم امكان اضافه كردن اكثر سيستم هاي تجاري مورد نياز يا علاقه در روي خودرو.
7_ عدم امكان استفاده از اكثر تجهيزات الكترونيك خودرو بر روي خودرو ديگر براي تست يا بر حسب نياز.
ساختار سخت افزاري ECU هاي سيستم مولتي پلكس خودرو 206
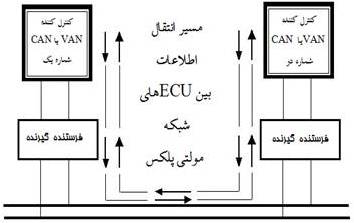
هر ECU خودرو 206 مولتي پلكس داراي يك سري پايه هاي Input و Output و يك اوسيلاتور توليد فركانس ( كه مي تواند بر مبناي RC و يا كوارتز باشد ) ، يك VAN و يا CAN كنترلر ( بر مبناي اين كه ECU مربوطه به شبكه CAN يا VAN متصل باشد ) و يك پورت ترانسيور Transceiver ( فرستنده و گيرنده ) است كه همزمان مي تواند اطلاعات ارسالي را در يافت نمايد. تمامي ECU ها در هنگام ارسال و دريافت اطلاعات توسط ECU ديگر قادر به مشاهده اطلاعات روي گذرگاه داده ها ( كه شامل دو سيم اطلاعاتي به هم پيچيده است ) مي باشند و از اين طريق مي توانند اطلاعات مربوطه را ارزيابي نموده و در صورت مرتبط بودن با اطلاعات از آن استفاده نمايند.
به عنوان مثال وقتي اطلاعات سنسور دور موتور بر روي گذرگاه داده ها ارسال مي گردد از طريق BSI اين اطلاعات بر روي شبكه CAN ، VAN Comfort و VAN Body ارسال مي گردد. در اين حالت به عنوان مثال ECU هاي تهويه ( A/C ) ، آمپر چهارگانه ، نمايشگر چند منظوره و راديو از اين اطلاعات براي تصحيح عملكرد خود و يا نمايش داده ها استفاده مي كنند.
وظايف BSI در سيستم مولتي پلكس
اين ECU قلب ساختار مولتي پلكس بوده و وظيفه اصلي را به عنوان Server شبكه به عهده دارد. BSI گذرگاهي براي ارتباط سه BUS مختلف بوده و اين اطلاعات را بين ECU فرستنده تا گيرنده منتقل مي كند. BSI وظيفه فعال سازي و Standby سيستم VAN را نيز بر عهده دارد و برق اصلي سيستم شبكه را نيز كنترل مي كند. همچنين واسطه بين تجهيزات عيب يابي و ECU هايي است كه به سيستم VAN متصلند.
انواع شبكه در سيستم مولتي پلكس
به طور كلي دو نوع BUS وجود دارد: VAN و CAN . حداكثر تعداد اين شبكه ها در اكثر خودرو ها سه سيستم مي باشد كه در خودرو 206 عبارتند از:
1 _ شبكه VAN Comfort با سرعت kbit/s 125.
2 _ شبكه VAN Body با سرعت kbit/s 5/62. ( در برخي از خودرو ها دو شبكه VAN Body وجود دارد مانند 607 ).
3_ شبكه CAN يا Power Train با سرعت kbit/s 250.
دو سيم به هم پيچيده در شبكه هاي VAN Comfort و VAN Body ، Data و DataB ناميده شده و دو سيم شبكه CAN به ترتيب CAN Hi و CAN Low نام دارند. حداكثر سرعت در CAN Low برابر kbit/s 125 و حداكثر سرعت در CAN Hi برابر Mbit/s 1 مي باشد.
توجه:
اطلاعات ما بين ECU هاي مختلف كه بر روي شبكه هاي مختلف مذكور متصلند از طريق BSI صورت مي پذيرد.
روش انتقال اطلاعات در شبكه هاي مولتي پلكس VAN و CAN
اطلاعات به سه صورت زير انتقال مي يابد :
1 _ روش نقطه به نقطه Point to point : كه در اين حالت اطلاعات ارسالي از يك ECU فقط به يك ECU ديگر انتقال مي يابد. در اين روش ECU مصرف كننده دريافت اطلاعات را با ارسال بيت ACK بر روي دو سيم مولتي پلكس به ECU فرستنده اعلام مي دارد.
2 _ روش چند نقطه اي Multi point : در اين روش اطلاعات ارسالي يك ECU مورد مصرف چند ECU خاص قرار مي گيرد. از آن جايي كه اعلام دريافت اطلاعات از طرف يك ECU بر روي شبكه به معناي دريافت اطلاعات توسط تمامي ECU ها تلقي خواهد شد ( بر روي شبكه در آن واحد فقط يك بيت صفر و يا يك قرار مي گيرد ) لذا عمليات ACK انجام نمي شود.
3 _ روش انتشاري Broadcast :اطلاعات ارسالي در اين روش در شبكه ارسال شده و هر ECU بر حسب امكان استفاده از اطلاعات مي تواند آن را از روي شبكه بردارد. در اين روش نيز همانند روش چند نقطه اي نياز به ACK نيست.
نكته مهم:
در روش چند نقطه اي و انتشاري در شبكه هاي VAN اگر اطلاعات در يك ECU مصرف كننده به درستي دريافت نشده و يا اصلا دريافت نشود سيستم كار خود را بدون هيچ ترفندي ادامه مي دهد و ECU مذكور بدون تداخل ، نسبت به استفاده و مونيتورينگ اطلاعات به دست آمده اقدام مي كند. مثلا اگر اطلاعات دماي آب به اشتباه به آمپر برسد ECU داخل آمپر نسبت به نمايش مقدار غلط اقدام مي كند و مانع از در يافت اين اطلاعات توسط بقيه ECU ها يي كه از اين اطلاعات استفاده مي كنند نمي شود.
اما در شبكه CAN از آن جايي كه تمامي ECU هاي متصل به شبكه از نوع Master هستند اگر اطلاعات مورد استفاده برخي ECU ها توسط يك ECU براي بقيه ارسال شود و يك ECU نتواند اطلاعت را درست دريافت كند با ارسال 6 بيت صفر در روي شبكه قسمت پاياني فريم اطلاعات ( EOF ) را خراب مي كند. آموزش مكانيك خودرو اين خراب شدن فريم اطلاعاتي به طور همزمان توسط تمام ECU ها ديده مي شود. لذا كليه ECU ها صبر كرده تا در دور بعدي ارسال Data همگي يك مقدار يكسان را دريافت كنند.
به عنوان مثال اگر اطلاعات سرعت خودرو به طور صحيح به ECU هاي انژكتور ، ABS و گيربكس اتوماتيك نرسد كار خودرو مختل مي شود لذا از ارسال اطلاعات به شبكه VAN جلوگيري به عمل مي آيد.
نكته مهم:
البته شمارنده اي در ECU هاي متصل به شبكه CAN وجود دارد كه در صورت مشاهده شدن خطاي اطلاعات ، ECU مسئول پس از چند بار خطا از مدار به كل خارج مي شود تا بقيه ECU ها دچار اختلال نشوند و بدين صورت است كه در صورت خرابي يونيت گيربكس اتوماتيك ،ECU انژكتور قادر به ادامه كار خود خواهد بود.